
随着自动驾驶算法等级的不断提供,各开发商的传感器布置方案也越来越丰富,最典型的为多V、多R及多L的方案。而在多种类,多数量的传感器进行物理模型仿真时,会占用大量的计算资源和网络通讯资源,同时仿真的效果还受到PCIe总线及显卡的接口数量限制。

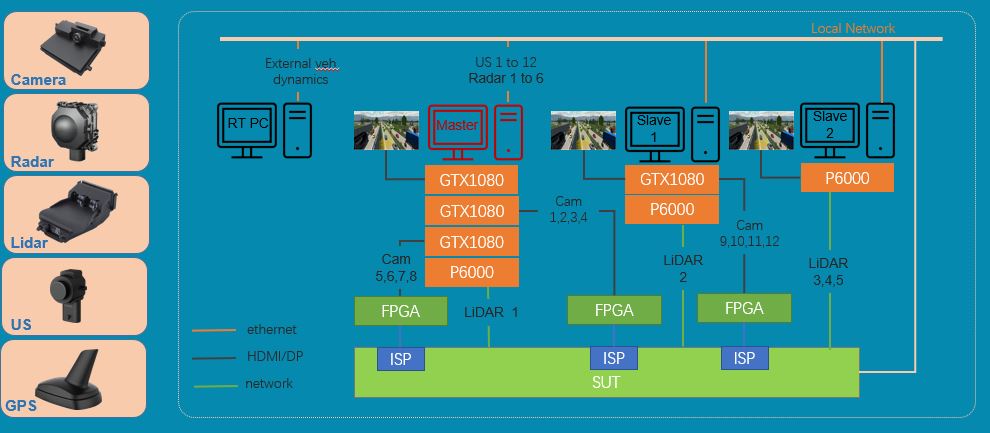
基于VTD的多物理传感器自动驾驶系统仿真方案,采用VTD的主从机布置方式,将VTD软件安装在主机Master上,从机slave上只安装运行VTD所需要的依赖,主机以mount的方式将仿真软件映射在从机Slave相应的位置。在主机中配置各类型传感器运行的显卡平台,仿真开始时,主机以ssh的方式将传感器的计算任务下发到从机Slave的显卡,以调用从机Slave的计算资源,达到仿真对速度的要求。各个计算机的显卡将计算完成的数据,分别通过HDMI和以太网的数据,发送到视频注入板(FPGA)或直接发送给被测系统SUT。从而在感知层实现全链路仿真。
该系统可以满足用户:
• 同时进行多路视频数据的感知算法验证;
• 同时进行多路激光雷达点云数据的仿真验证;
• 同时进行多路毫米波雷达点云数据的仿真验证;
• 可进行多V多R和多L的物理模型仿真验证;
• 可进行行泊一体的算法仿真验证。
完善信息后我们将会尽快与您取得联系,并将资料发送至您的邮箱。感谢您对海克斯康的支持。








 鲁公网安备37020002000329号
鲁公网安备37020002000329号