
在航空航天领域,对飞行器的姿态需要实时准确的获取,以便给自控系统或其它相关系统传递必要基础数据完成相关功能,但是,由于飞行器在三维空间中任意姿态飞行,相对全局坐标系进行测量往往达不到理想效果,另外,虽然实现这种测量的手段还有其它,但是往往会造成所测角度超过90度会产生突变,比如弹体连续翻滚,因此,有必要采用一种更有效的测量手段应用于实际工程中。
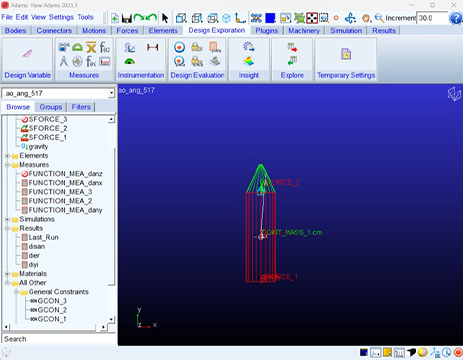
本方案的核心在于自定义约束和AO函数的综合使用,基于创建的虚质量点与飞行器测点,相对飞行器指定的局部坐标系进行各轴角度的测量。
虚质量点这里用点质量模拟,其质量可以设置为任意值,因为,其质量并不会作用到飞行器上。自定义约束是Adams为了拓展应用灵活性所释放的一种接口,通过自定义函数实现对位移、速度等的约束,满足工程师比较特殊的需求。AO函数,即Action Only函数,该函数的核心在于可以截断指定对象的约束反力,可以基于拉格朗日方程中的拉格朗日乘子进行解释。
Action only函数在约束方程中具备隔离标量表达式某些部分与约束反力的功能。通过对受约束系统的拉格朗日方程进行研究,可以很好地理解Action only函数的作用。
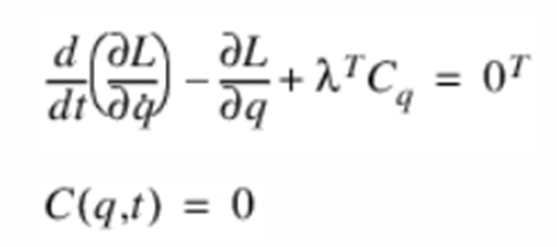
其中,
L为系统能量;
Q为广义坐标;
C为约束;
λ为拉格朗日乘子;
通过拉格朗日方程可知,基于约束雅可比矩阵将约束反力投影到广义运动方程中,而基于Action only函数的机制,可以使某些选定的广义坐标免受约束反力的作用,从而实现数学上的隔离。
该函数只能用于约束方程表达式中,其形式很简单AO(exp),这里的表达式就标明了哪些量将同约束反力隔离。
比如下面的示例:
描述Marker_1和Marker_2之间的约束方程如下所示:
GCON/1, FUN=DX(1) - AO(DX(2))
GCON/2, FUN=DY(1) - AO(DY(2))
GCON/3, FUN=DZ(1) - AO(DZ(2))
通过上述三条约束方程,实现两个点的平动位移绑定,如果不用AO函数,将实现同球铰一样的效果,但是这里使用了AO函数,表现出的效果为,约束反力仅会作用到Marker_1上,而不会作用到Marker_2上,从作用效果上看,就是实现了将Marker_1推向Marker_2,而不会有将Marker_2推向Marker_1的效果。
由于AO函数截断了虚质量和飞行器之间的相互作用力传递,所以其质量不会影响飞行器的各种受力,相当于虚质量不存在。此时,虚质量仅仅用于角度测量,但是,由于自定义约束的存在,又能保证虚质量可以同飞行器测点保持同步,这种看似完全不符合力学常识的行为,真实发生在了模型上。换句话说,这种方法是基于数学的方式解决了力学的问题,为实际工作提供了便宜。
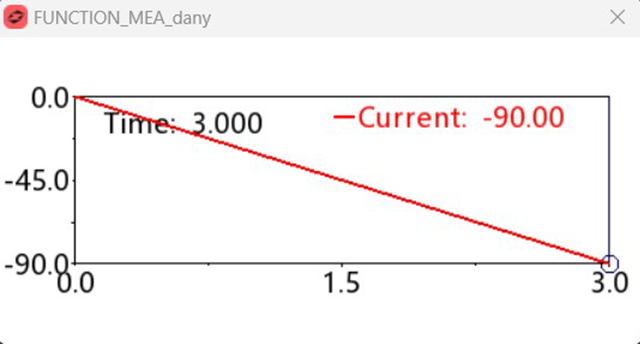
基于AO函数和自定义约束完成前期准备工作,即可完成后继的有效测量。
该方法适用于飞行器任意状态下的姿态角获取,不会因为多个自由度的耦合产生相互影响。
由于AO函数的截断作用,辅助测量元素和真实系统元素之间没有力学传递作用,不会对系统的受力产生影响。
完善信息后我们将会尽快与您取得联系,并将资料发送至您的邮箱。感谢您对海克斯康的支持。






 鲁公网安备37020002000329号
鲁公网安备37020002000329号